
XGO-mini

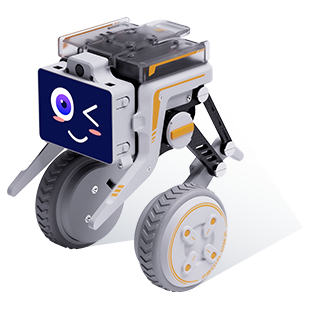
XGO-lite3
K12编程教育的首选教具,全向移动12自由度,支持Python/Blockly编程。它不仅是机器狗,更是桌面上的 AI实验室 ,让编程学习生动有趣。

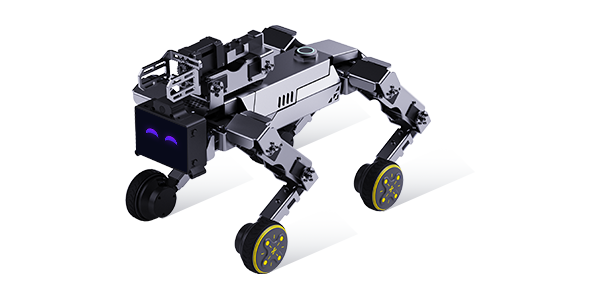
XGO-mini2s
极客与开发者的全能平台,更强算⼒,更强负载,支持 ROS二次开发 ,满足高校科研与高阶开发需求,是技术探索的理想伙伴。

具身智能
互动小智
智能体
目标检测
小球抓取
人脸跟踪
自动循线
手势识别
人机对话
骨骼识别
产品特性
IMU姿势自稳
通过IMU获得的姿态数据,采用闭环控制的方式,无论平面如何倾动,机器狗都能保持稳定
整机六自由度姿态控制
定尖不动的情况下,实现体现六个自由度的运动控制
IMU姿势柔顺
通过IMU获得的姿态数据,闭环控制实现 机器狗可以实适应外力,调整到手掰动的目标姿态,实现示教功能
用户通讯与二次编程接口
开放底层串口协议,用于二次开发和验证
运动步态规划
机器狗低中高三种姿势匹配三种速度, 采用不同的步态策略和规划算法
运动学与动力学仿真接口
在 ros 环境下,在 rviz 和 gazebo 平台上进行运动学与动力学仿真
全向运动控制
由于具有15个主动关节,通过运动学解耦 实现机器狗前进平移转动全向运动,并 支持多个方向的运动叠加
人工智能
机器视觉,人脸识别,语音识别,模型训练等AI功能
仿生动作
机器狗具有多自由度的运动能力,运动设计高效,目前精心设计了 20 多个动作组,收纳在配套的 APP 中,一键命令即可

打招呼

伸懒腰

撒尿

找食物
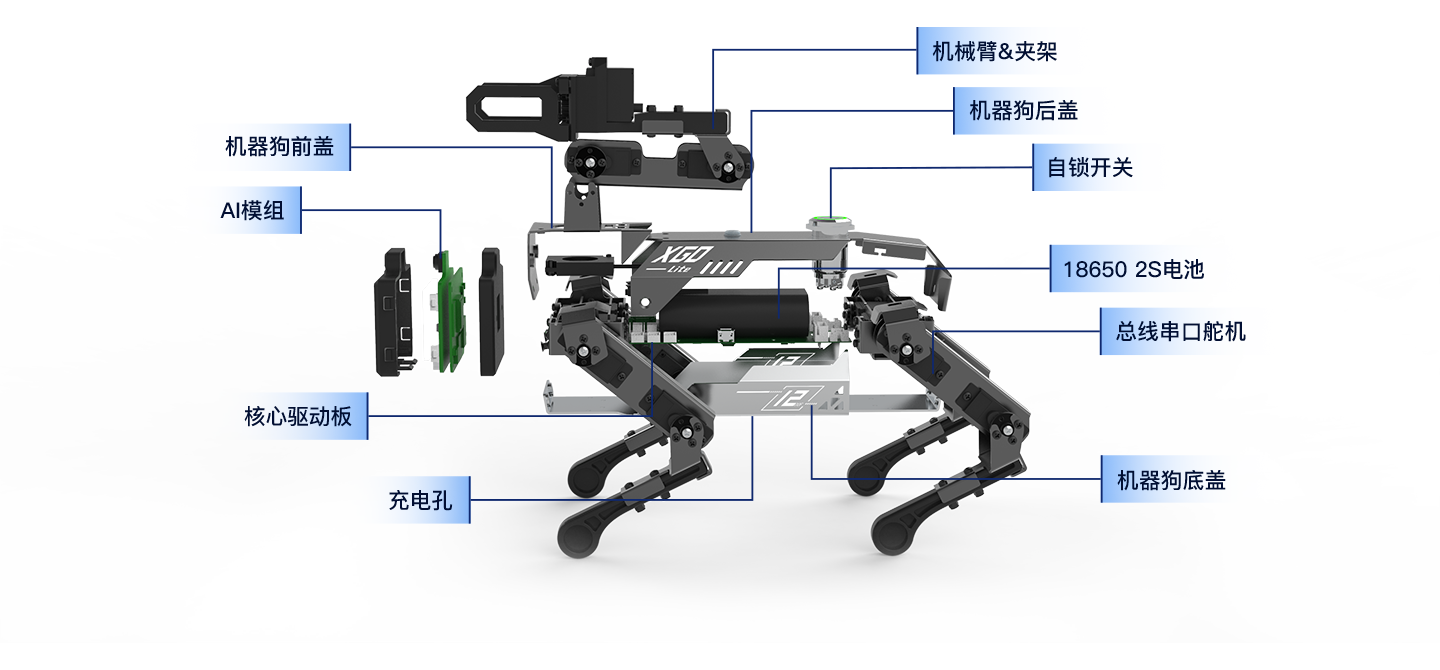
产品结构